1979783
Question 1
Question
Jaki jest główny cel stosowania odpornych układów regulacji?
Answer
-
zmniejszenie wpływu zakłóceń na zmienną regulowaną
-
zmniejszenie wrażliwości układu regulacji na zmianę parametró obiektu
-
poprawa dobroci regulacji
-
eliminacja uchybu statycznego
Question 2
Question
Jaki jest główny cel stosowania adaptacyjnych układów regulacji?
Answer
-
zmniejszenie wpływu zakłóceń na zmienną regulowaną
-
zmniejszenie wrażliwości układu na zmianę parametrów obiektu
-
poprawa dobroci regulacji
-
eliminacja uchybu statycznego
Question 3
Question
Różnica w realizacji regulatora rozmytego przy wykorzystaniu metodyki Mamdaaniego i Sugeno występuje przy:
Answer
-
rozmywaniu zmiennych wejściowych
-
wyostrzaniu zmiennych wyjściowych
-
w bazie reguł
-
w bazie wiedzy
Question 4
Question
Jakie są ograniczenia przy zastosowaniu minimalno-czasowych układów regulacji?
Answer
-
minimalnofazowość obiektu
-
ograniczona wartość sygnału sterującego
-
czas próbkowania
-
stabilność układu
Question 5
Question
Jakie działanie regulatora PID można pominąć przy sterowaniu obiektem astatycznym?
Answer
-
części różniczkującej
-
części całkującej
-
części proporcjonalnej
-
podwójnego różniczkowania
Question 6
Question
Jaki jest cel stosowania układu kompensacji automatycznej?
Answer
-
eliminacja uchybu statycznego
-
eliminacja zakłócenia
-
zmniejszenie czasu regulacji
-
zmniejszenie przeregulkowania
Question 7
Question
Zaznacz najczęściej stosowane standardy wejść i wyjść przetwornikó A/C i C/A
Answer
-
0-20mA
-
0-10V
-
4-20mA
-
-10-+10V
Question 8
Question
Główne różnice w metodach doboru nastaw regulatorów dysketnych i ciągłych to:
Answer
-
opracowanie metody można zastosować tylko dla regulatorów PI i PID
-
obowiązują te same metody ale z uwzględnieniem czasu próbkowania
-
nie ma specjalnych metod dla reg dyskretnych
-
nie ma różnicy
Question 9
Question
Warunkeim koniecznym i wystarczającym stabilności liniowego, stacjonarnego ukłądu dyskretnego jest:
Answer
-
aby wszystkie bieguny tansmitancji znajdowały się wewnątrz koła jednostkowego
-
aby wszystkie bieeguny transmitancji znajdowały się z lewej strony płaszczyzny zespolonej
-
aby wszystkie zera znajdowały się wewnątrz koła jednostkowego
-
aby wszystkie bieguny transmitancji znajdowały się poza kołem jednostkowym
Question 10
Question
Metodą przejścia z dziedziny s na dziedzinę z jest:
Answer
-
ZOH
-
metod zero pole
-
aproksymacja Tustina
-
metoda mamdaniego
Question 11
Question
Algorytm pozycyjny
Answer
-
jest przyrostowy
-
jest położeniowy
-
określa wartość absolutna
-
określa zmianę wartości sygnału
Question 12
Question
Metody wyostrzania ( defuzzyfikacji)
Answer
-
środka ciężkości
-
pierwszego maksimum
-
ostatniego maksimum
-
mamdaniego
Question 13
Question
Algorytm prędkościowy
Answer
-
jest przyrostowy
-
jest położeniowy
-
określa wartość absolutna
-
określa zmianę wartości sygnału
Question 14
Question
Filtr Czebyszewa I
Answer
-
zoptymalizowany dla najszybszego sspadku wzmocnienia w paśmie przejściowym
-
zafalowania w paśmie przepustowym
-
stossowany w przypadkach gdy ważny jest szybki spadek wzmocnienia i brak zafalowań w paśmie zaporowym
-
zafalowania w paśmie zaporowym
Question 15
Question
Filtr Bessela charakteryzuje się:
Answer
-
najbardziej liniową charakterystyką fazową
-
bardzo powolnym spadkiem wzmocnienia w paśmie przejściowym
-
stosowany jest w przypadkach gdy ważny jest czasowy przebieg sygnału
-
zafalowania w paśmie zaporowym
Question 16
Question
Ktory filtr charakteryzuje się największą liniowścią i bardzo powolnym spadkiem?
Answer
-
Czybyszewa I
-
Czybyszewa II
-
Bessela
-
Eliptyczny
Question 17
Question
Kwantyzacja sygnału
Answer
-
W procesie tym przyjmuje się równe skoki amplitudy zwane kwantami
-
Zastępowanie zmiennej ciągłęj zmienną skokowa, co w połączeniu z próbkowaniem umożliwia dyskretyzację sygnału
-
Dokładność przybliżenia zależy od liczby poziomów kwantowania
-
Stosowana jest przy zamianie sygnały dyskretnego na ciągły.
Question 18
Question
Obiekt 5-tego rzędu regulowany jest regulatorem deadbeat o Tp=0.2s Ile potrwa regulacja tego obiektu?
Answer
-
1s
-
0.2s
-
0.4s
-
Jeśli sygnał sterujący jest ograniczony to nie da się tego policzyć
Question 19
Question
Parametry nastawialne regulatora deadbeat
Answer
-
Współczynniki regulatora
-
Czas próbkowania
-
Wzmocnienie
-
Częśtotliwość próbkowania
Question 20
Question
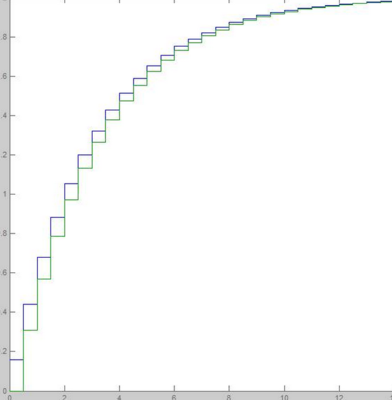
Rysunek obok przedstawia metody dyskretyzacji sygnału
{kind=link}
Answer
-
Niebieski ZOH, zielony FOH
-
Zielony FOH
-
Zielony ZOH
-
Niebieski FOH, zielony ZOH
Question 21
Question
Aliasing
Answer
-
Nakładanie się widm sygnału cyfrowego okresowo zwielokrotnionych w dziedzinie częstotliwości
-
Wynika z niespełnienia założeń twierdzenia Kotielnikowa-Shannona
-
Wynika z niespełnienia warunku Nyquista
-
Występuje przy użyciu filtra dolnoprzepustowego.
Question 22
Question
Jakie będą wartości D21 i D30 po wykonaniau działania:
DMOV K20 D21
DMOV K30 D30
DLIMIT D21 D30 D21 D30
Answer
-
D21=20 D30=30
-
D21=20 D30=20
-
D21=30 D30=30
-
D21=30 D30=20
Question 23
Question
Jaki jest związek pomiędzy czasem próbkowania a sygnałem sterującym w regulatorze deadbeat
Answer
-
im mniejszy czas próbkowania tym większy sygnał sterujący
-
nie ma związku
-
im większy czas próbkowania tym większy sygnał sterujący
-
im mniejszy czas próbkowania tym mniejszy sygnał sterujący
Question 24
Question
Etapy budowy w modelu rozmytym:
Answer
-
1. Rozmywanie 2. Łączenie wniosków 3. Łączenie rozmytych przesłanek 4. Defuzyfikacja wyjścia (wyostrzenie)
-
1. Rozmywanie 2. Łączenie rozmytych przesłanek 3. Łączenie wniosków 4. Defuzyfikacja wyjścia (wyostrzenie)
-
1. Rozmywanie 2. Łączenie wniosków 3. Łączenie rozmytych przesłanek
-
1. Rozmywanie 2. Łączenie rozmytych przesłanek 3. Łączenie wniosków
Question 25
Question
DMOV K100 D2
DDIV D2 K200 D2
Answer
-
D2=0.5
-
D2=100
-
D2=0
-
D2=200
Question 26
Question
DMOV K20 D20
DMOV K30 D30
DMUL D30 D20 D30
Answer
-
D30=30 D31=20
-
D30=600 D31=0
-
D30=0 D31=600
-
D30=6 D31=00
Question 27
Question
Konsekwencją efektu wind-up jest:
Answer
-
wzrost przeregulowania
-
wydłużenie czasu ograniczenia sygnału
-
człon całkujący
-
może doprowadzić do niestabilności układu
Question 28
{kind=link}
Answer
-
człon calkujący
-
człon różniczkujący
-
regulator czasooptymalny
-
człon proporcjonalny
Question 29
Question
Co należy uwzględnić przy doborze czasu próbkowania?
Answer
-
dobroć regulacji
-
minimalnofazowość obiektu
-
charakterystyki częstotliwościowe obiektu
-
czas realizacji algorytmu lub kompensacji
Question 30
{kind=link}
Answer
-
Czebyszewa I
-
Czebyszewa II
-
FIR
-
Cauera
Question 31
Question
Czym się charakteryzuje FIR?
Answer
-
liniowość
-
stabilność
-
brak sprzężenia zwrotnego
-
mała liczba współczynników
Want to create your own Quizzes for free with GoConqr? Learn more.